激光雷达VS摄像头 特斯拉是如何选择的?
[爱卡汽车 用车原创]
纵观如今国内乃至全球新能源汽车的销量 , 特斯拉Model 3无疑是头号领头羊 , 随着近期国内Model 3的又一波降价 , 可以预见其销量还会持续攀升 。 而许多车主购买Model 3的重要原因之一便是看中了特斯拉领先其他车辆的自动驾驶技术 。
根据车辆自动驾驶技术感知层的解决方案 , 我们可以将市面上的自动驾驶汽车分为“纯视觉计算”与“激光雷达”两大派系 。 随着自动驾驶技术的发展 , 这两大派系之间的争论也愈演愈烈 , 而特斯拉的掌舵人马斯克也在公共场合数次diss对手 。 那么特斯拉是属于哪一派系 , 其自动驾驶技术有什么弊端又是如何解决的呢?
 文章插图
文章插图
 文章插图
文章插图
其实自动驾驶技术并不难理解 , 其整个工作过程可以简单类比人类分为“感知”、“思考”、“做出反应”三个步骤 , 只不过对于机器而言 , 整个过程中 , 当属“感知”最为复杂 , 只有正确无误的识别出车辆周围复杂的环境 , 才能为后续计算机的正确“思考”与“做出反应”打下基础 。
 文章插图
文章插图
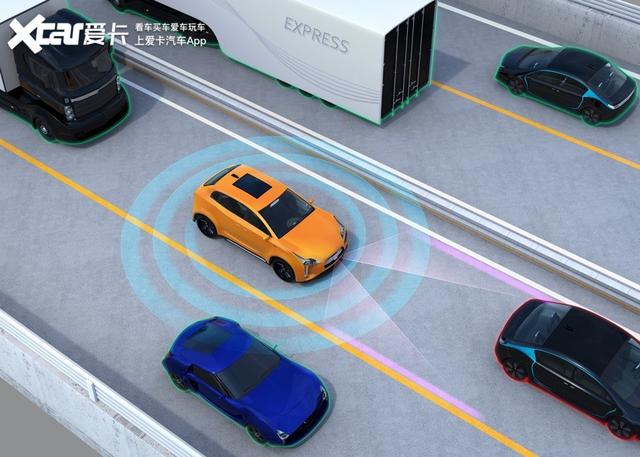
目前关于自动驾驶技术感知层面的解决方案有两种 , 一种是由摄像头主导、配合毫米波雷达等低成本元件组成 , 也就是纯视觉计算 。 另一种是由激光雷达主导 , 配合摄像头、毫米波雷达等元件组成 。 而两大派系争论的焦点便是需不需要使用激光雷达 。
▼激光雷达与摄像头在技术上有何区别?
 文章插图
文章插图
激光雷达是使用激光进行探测和测距 , 通过元件投射出大量的光线 , 再依照光线折射返回的数量与时间测算物体的大小与距离 。 此种雷达投射出的光线越多 , 呈现出的图像也就越精确 , 相应的价格也就越高 。
 文章插图
文章插图
相比之下 , 摄像头的工作原理便非常简单 , 仅需要收集外界反射的光线便能呈现出外界环境画面 。 不过摄像头所呈现的图像为2D , 不具备激光雷达强大的测距能力 , 且受外界光线的影响极大 , 但好处就是比较容易将物体分类 , 且价格便宜 。 二者的价格之差甚至超过了10倍 。
▼特斯拉是如何选择的?
 文章插图
文章插图
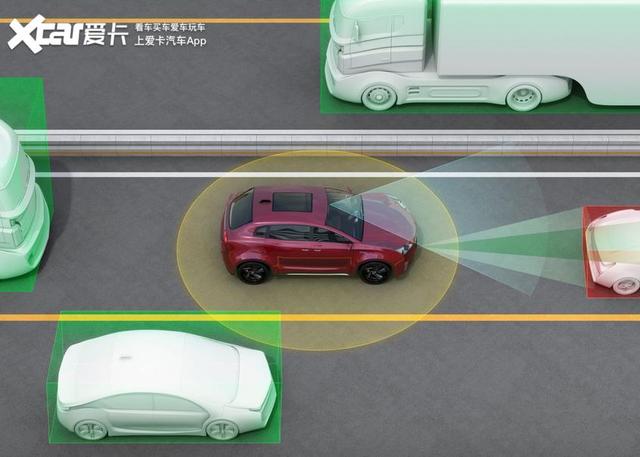
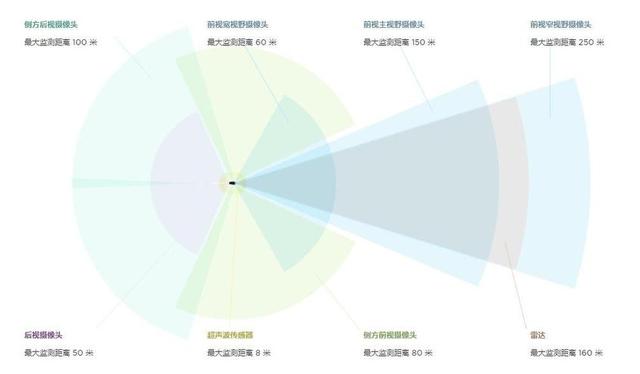
特斯拉的Autopilot系统传感器包含了全车8个摄像头、12个超声波传感器、1个毫米波前置雷达 。 很显然 , 特斯拉舍弃了激光雷达的方案 , 选择站在纯视觉计算的队列 。
 文章插图
文章插图
坦白来说 , 通过2D图像精确推算3D立体实景图像是非常难的 , 而特斯拉能够做到即便只有2D图像也能精确还原物体3D实景的核心秘籍便是技巧、记忆以及经验 。
 文章插图
文章插图
事实上 , 在特斯拉的Autopilot系统中内置了一个深度神经网络 , 通过海量车主的驾驶数据 , 进行神经网络训练 , 从而不断覆盖更多工况与场景 , 达到视觉算法无限接近于人类判断的目的 。 也就是说 , 特斯拉车主在只要驾驶车辆 , 便会参与到特斯拉神经网络的训练中 。
 文章插图
文章插图
- 程序员为教师妻子开发应用:将iPhone变成文档摄像头
- 外媒赞赏戴尔笔记本的摄像头隐私挡板设计 希望其它厂商能够跟进
- 三星再曝屏下摄像头新专利,Redmi Note 10 Pro获得认证
- 三星再曝屏下摄像头新专利 消灭打孔屏指日可待
- 三星又一屏下摄像头技术专利曝光:要和打孔说再见
- 识别|不摘口罩也能识别人脸?伊朗推出新型智能摄像头加强治安
- 戴尔发布Latitude 9000笔记本新品 拥有自动摄像头快门等功能
- 曝iPhone 13全系标配激光雷达扫描仪 真就十三香?
- 屏下摄像头物理隔绝难突破 三星或利用AI提升画质
- 首款搭载华为鸿蒙OS的智能摄像头开售