吉林大学TARS-GO战队视觉代码( 二 )
 文章插图
文章插图
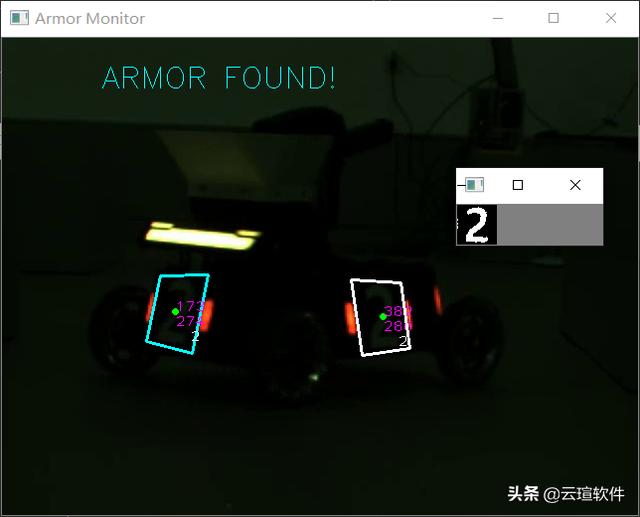
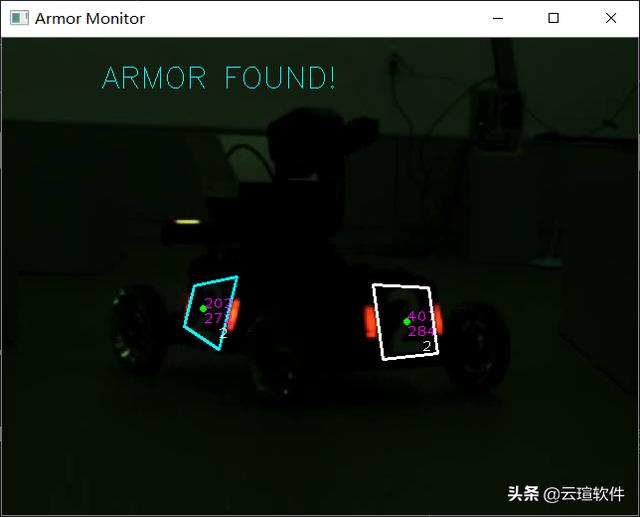
- 目标装甲板选取对上述各项装甲板信息(顶点中心点坐标与枪口锚点距离、面积大小、装甲板数字及其是否与操作手设定匹配)进行加权求和 , 从而获取最佳打击装甲板作为最终的目标装甲板 。
 文章插图
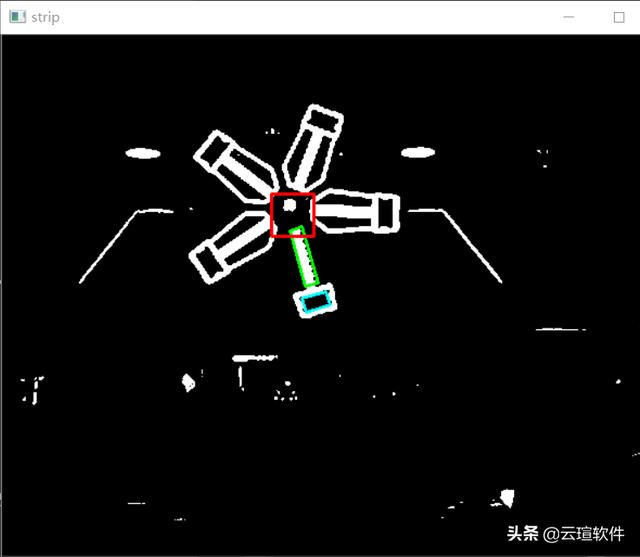
文章插图大风车识别首先对图像进行二值化操作 , 然后进行一定腐蚀和膨胀 , 通过边缘提取和条件限制得出待击打叶片(锤子形) 。 在待击打叶片范围内进一步用类似方法寻找目标装甲板和流动条 , 在二者连线上寻找中心的“R” 。 根据目标装甲板坐标和中心坐标计算极坐标系下的目标角度 , 进而预测待击打点的坐标(小符为装甲板本身 , 大符需要旋转) 。 最后将待击打点坐标和图像中心的差值转换为yaw和pitch轴角度 , 增加一环PID后发送给云台主控板 。
 文章插图
文章插图项目代码:
- 日本工程师:潘多拉魔盒被美国打开,中国办芯片大学只为打破禁令
- 卡内基梅隆大学提出了更好的强密码设置建议
- 建设|校地合作 绵阳涪城区携手浙江大学发布5g创新成果
- 又是别人家的孩子?宿舍串门请先刷指纹 西电大学生自制趣味智能锁成“网红”
- 普通大学计算机专业的本科生,该选择主攻前端还是Java
- 浙江携手英国西苏格兰大学共建创新基地
- 导航|攻坚“卫星导航信号弱”难题,高德程序员联手武大学子夺得国际室内定位大赛冠军
- 清华大学研究院出手!擦一次,持续24小时防雾,改变眼镜党体验
- 北大最大单体建设项目封顶
- 首家"芯片大学"即将落成,盖茨:中国芯将崛起,美国将大量失业