吉林大学TARS-GO战队视觉代码
介绍本代码是吉林大学TARS-GO战队Robomaster2020赛季步兵视觉算法 , 主要模块分为装甲板识别、大风车能量机关识别、角度解算、相机驱动及串口/CAN通信 。
1.功能介绍
- 装甲板识别 ,检测敌方机器人装甲板位置信息并识别其数字
- 大风车能量机关识别 ,检测待激活大风车扇叶目标位置信息
- 角度解算, 根据上述位置信息解算目标相对枪管的yaw、pitch角度及距离
- 相机驱动 ,大恒相机SDK封装 , 实现相机参数控制及图像采集
- 串口/CAN通信 ,与下位机通信 , 传输机器人姿态信息及操作手反馈视觉的控制信息
**EnemyColor = BLUE; TargetNum = 1**
 文章插图
文章插图**EnemyColor = RED; TargetNum = 2**
 文章插图
文章插图在640*480图像分辨率下 , 装甲板识别帧率可达340fps左右 , 引入ROI之后可达420fps 。 但考虑到识别帧率对于电控机械延迟的饱和 , 取消引入ROI操作 , 以此避免引入ROI之后无法及时探测全局视野情况的问题 , 加快机器人自瞄响应 。
【吉林大学TARS-GO战队视觉代码】**640\*480(峰值可达340FPS)**
 文章插图
文章插图**320\*240(峰值可达1400FPS)**
 文章插图
文章插图装甲板数字识别采用SVM , 通过装甲板位置信息裁剪二值化后的装甲板图像并透射变换 , 投入训练好的SVM模型中识别 , 数字识别准确率可达98% 。
 文章插图
文章插图大风车能量机关识别
 文章插图
文章插图角度解算角度解算方面使用了两种解算方法分距离挡位运行 。 第一档使用P4P算法 , 第二档使用小孔成像原理的PinHole算法 。 此外还引入了相机-枪口的Y轴距离补偿及重力补偿 。 使用标定板测试 , 角度解算计算的距离误差在10%以内 , 角度基本与实际吻合 。
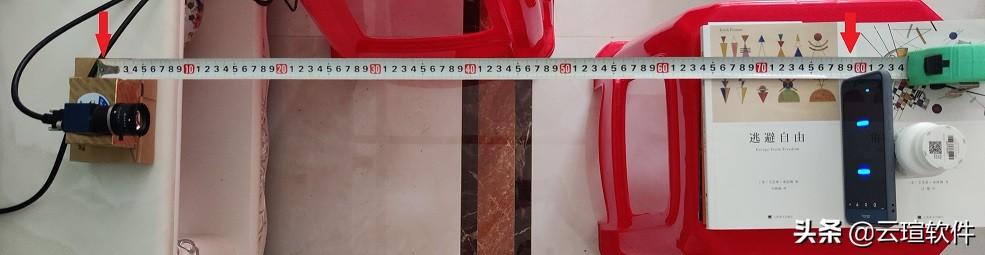 文章插图
文章插图 文章插图
文章插图/** *@brief: detect and delete error armor which is caused by the single lightBar 针对游离灯条导致的错误装甲板进行检测和删除 */void eraseErrorRepeatArmor(vectorvector::iterator it = armors.begin(); for (size_t i = 0; i < length; i++)for (size_t j = i + 1; j < length; j++){if (armors[i].l_index == armors[j].l_index ||armors[i].l_index == armors[j].r_index ||armors[i].r_index == armors[j].l_index ||armors[i].r_index == armors[j].r_index){armors[i].getDeviationAngle() > armors[j].getDeviationAngle() ? armors.erase(it + i) : armors.erase(it + j);}}}- 装甲板数字识别匹配好装甲板后 , 利用装甲板的顶点在原图的二值图(原图的灰度二值图)中剪切装甲板图 , 使用透射变换将装甲板图变换为SVM模型所需的Size , 随后投入SVM识别装甲板数字 。
- 日本工程师:潘多拉魔盒被美国打开,中国办芯片大学只为打破禁令
- 卡内基梅隆大学提出了更好的强密码设置建议
- 建设|校地合作 绵阳涪城区携手浙江大学发布5g创新成果
- 又是别人家的孩子?宿舍串门请先刷指纹 西电大学生自制趣味智能锁成“网红”
- 普通大学计算机专业的本科生,该选择主攻前端还是Java
- 浙江携手英国西苏格兰大学共建创新基地
- 导航|攻坚“卫星导航信号弱”难题,高德程序员联手武大学子夺得国际室内定位大赛冠军
- 清华大学研究院出手!擦一次,持续24小时防雾,改变眼镜党体验
- 北大最大单体建设项目封顶
- 首家"芯片大学"即将落成,盖茨:中国芯将崛起,美国将大量失业