NTU 科研团队实现机器人识别疼痛及自我修复功能
新加坡南洋理工大学的科研团队利用“类脑”(brain-inspired)技术使已经开发的人工智能(AI)机器人可以认识到因损坏带来的疼痛并进行自我修复 。
该系统具有支持AI的传感器节点 , 可以处理并响应由物理力施加的压力引起的“疼痛” 。 该系统还允许机器人在轻微“受伤”时检测并修复自身的损坏 , 而无需人工干预 。
传统机器人传感器
现如今 , 机器人使用传感器网络来感知其周围环境的信息 。
例如 , 灾难救援机器人使用摄像头和麦克风传感器在废墟下找到幸存者 , 然后在其手臂上的触摸传感器的引导下将被困人员解救 。 进行装配工作的工厂机器人则会使用视觉传感器引导其手臂到正确的位置 , 并触摸传感器来确定装配后的物体是否在滑移 。
 文章插图
文章插图
来源 :bbc.com
如今的传感器通常不会进行处理信息的工作 , 而是将收集到的信息传输到中央处理单元 。
这也导致了现有的机器人通常布线繁琐 , 响应时间长 。
同样的 , 它们还容易受到损坏 ,维护和修理的的时间成本很高 , 而且维修过程也十分昂贵 。
新型的传感网络
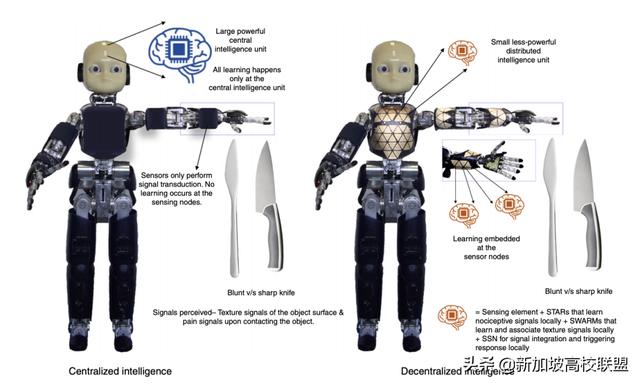
NTU科研团队最近研发出一种新型的方法:将AI嵌入到传感器节点的网络中 。
该传感器节点连接到多个较小的 , 功能较弱的处理单元 , 就像分布在机器人皮肤上的“迷你大脑”一样 。
 文章插图
文章插图
两种机器人对比 来源:Nature Communications
科学家们说 , 这意味着学习是在各个传感器之上进行的 , 并且机器人的布线要求和响应时间比传统机器人减少了五到十倍 。
科学家们将系统与一种可自我修复的离子凝胶材料结合使用 , 意味着机器人在受到损坏时可以在无需人工干预的情况下恢复其机械功能 。
 文章插图
文章插图
来源:NTU官网
NTU科学家的突破性研究于八月发表在同行评审的科学杂志《自然通讯》上 。
该研究的共同第一作者 , 来自电气与电子工程学院Arindam Basu助理教授从表示:“为了使机器人有一天能真正的与人类一起工作 , 我们应该去关注如何确保他们与人类进行安全的交互 。 ”
世界各地的科研团队也一直在寻找使机器人具有感知能力的方法 , 例如:能够“感觉”疼痛 , 做出反应并承受一些比较恶劣复杂的工作条件 。
但是 , 将众多传感器组合必然会导致让整个系统变的更加复杂且更加脆弱 。 而这也是为什么类似的技术没有被推广的主要障碍 。
神经形态计算专家Basu副教授补充说:“我们的工作证明了一种机器人系统的可行性 , 该机器人系统能够以最少的布线和电路有效地处理信息 。 通过减少所需的电子组件数量 , 使得整个系统对环境的适应性更强且可扩展 。 ”
这项技术将有助于加速市场上最新一代机器人的产生与发展 。
 文章插图
文章插图
来源:NTU Twitter
“受伤”的机器人能够自我修复
为了教机器人如何识别疼痛伤害性刺激 , 研究团队设计了作为记忆体和神经元的晶体管 , 它们是能够进行记忆和信息处理的核心电子设备 , (即“类脑”) , 是人工痛觉感受器和突触 。
 文章插图
文章插图
来源:Nature Communications
通过实验数据 , 研究团队展示了机器人如何实时学习对伤害的反应 。
他们还表明 , 即使在损坏后 , 机器人仍能继续对压力作出反应 , 证明了系统的稳固性 。
- 小米授予技术团队百万美元大奖 雷军:将继续加大技术投入
- 团队奖就奖华为办公宝,跟着李成儒选择准没错
- 华中科大教授团队攻克5G世界性难题 让5G手机坐汽车都不掉速
- 技术|「科技创新 引领未来」科研服务民生“双轮驱动”促成果落地
- 全球首创!45秒速览“连钢创新团队”十大科技创新成果
- 科研服务民生“双轮驱动”促成果落地
- Google Chrome开发团队正探索通过扩大浏览器缓存解决性能问题
- 申请|孟晚舟律师团队新动作
- Project Zero团队披露微软尚未完全修复的Windows 10提权漏洞
- 成果|全力推进优秀科研成果转化落地,同济大学发布“十大最具转化潜力科技成果”