Waymo与谷歌提出TNT模型,实现自动驾驶多轨迹行为预测
导读:Waymo 近期宣布在凤凰城地区开放没有安全员的无人驾驶出租车 , 实现首个商用的真正的无人驾驶 。 与此同时 , Waymo 也公开分享了一系列新的研究论文 , 本文就来讲解一下 Waymo 在行为预测方面的研究成果 。
周围的车辆和行人在接下来数秒中会做什么?要实现安全的自动驾驶 , 这是一个必须回答的关键问题 , 这也就是自动驾驶领域中的行为预测问题 。
行为预测的难点在于周围行人、车辆的不确定性和各种规则之外的行为 。 这些状况难以用规则进行总结 , 因此最近研发人员们开始利用基于数据驱动的深度学习的方法 , 以达到更加合理的预测效果 。
在这方面 , 来自 Waymo 和谷歌的团队提出了一系列用于自动驾驶行为预测的模型 , 让无人车理解抽象的道路环境 , 并实现对车辆、行人的多可能性预测 。
在今年 6 月的一篇 CVPR 论文中 , 这个团队首先提出了一个全新模型 VectorNet 。
【Waymo与谷歌提出TNT模型,实现自动驾驶多轨迹行为预测】在该模型中 , 团队首次提出了一种抽象化认识周围环境信息的做法:用向量(vector)来简化地表达地图信息和移动物体 , 这一做法抛开了传统的用图片渲染的方式 , 达到了降低数据量、计算量的效果 。 Waymo 也在其博客文章中明确表示 , 该技术提高了其行为预测的精准度 。
近日 , 这个团队公布了进一步的工作 , 提出了 TNT (Target-driveN Trajectory Predictio) 。 TNT 是一种目的地引导的轨迹预测方法 , 运用了监督学习的方法对车辆和行人进行多轨迹回归 , 最终的模型能够输出多个未来轨迹的预测 , 同时明确指出各个轨迹可能性 。
论文中介绍 , TNT 在公开数据集 Argoverse 的测试表现与冠军结果相当 , 同时在 INTERACTION、Stanford Drone , 以及 Waymo 内部数据集中取得了非常好的效果 。
目前该论文已经被国际机器人学习会议 CoRL(Conference on Robot Learning)接收 。
 文章插图
文章插图
预测多种可能的未来情形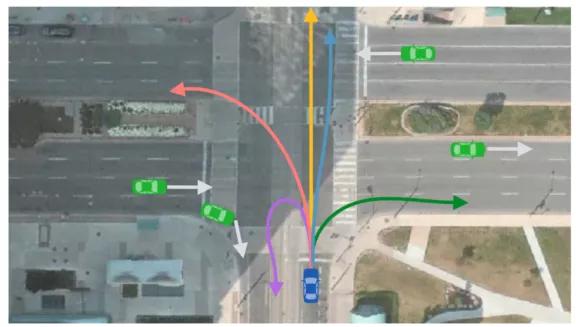 文章插图
文章插图
Waymo 在博客中指出 , VectorNet 突破性地提出了用向量的方式来抽象化表达这个世界 , 从而感知、理解周围环境 。 在理解环境以后 , 下一步就是实现更好的行为预测 。
自动驾驶行为预测和其他问题不一样的地方在于 , 周围的车辆、行人在接下来数秒时间里有多种行进的可能性 。 这些可能性本身也将影响自动驾驶车辆的决策规划 。
比方说 , 如果机器能算出:前方车辆有 80% 的概率左转、20% 的概率右转 , 自动驾驶车辆都能根据这一结果进行更好的决策规划 。 同时对机器来说 , 就算别的车辆只有 1% 的可能性右转 , 这种可能性也不能被忽视 。
而这种针对多种可能性的多轨迹预测 , 有着很大的技术难度 。 当下的神经网络难以很好应对多轨迹预测的任务 。
据业内人士介绍 , 神经网络擅长于一对一和多对一的拟合问题 , 而非一对多的问题 。 多对一如常见的分类问题 , 输入多张车辆的照片 , 神经网络能准确识别这些照片为 “车” 的类别 。 一对一如常见的回归问题 , 输入一张车辆的照片 , 神经网络能估计它的长宽高等尺寸 。 但如果输入一个样本 , 想让神经网络回归出三个结果 , 这是神经网络所不擅长的事情 。
据介绍 , 现在市面上基础的方案是基于交通规则获得周围车辆、行人的行进可能性 。 如果交规允许这条道路直行、左右转 , 那么就算三种可能性 。 但这种方式的预测结果并不完全可靠 , 因为规则之外的案例并未被考虑其中 , 如借道 , 违法掉头 , 事实上 , 要保障自动驾驶长时间运行下的安全性 , 应对规则之外的情形的能力非常重要 。
- 高通和联发科慌了?谷歌将推出自研手机和电脑芯片
- SOTA论文也未必能被接收,谷歌科学家谈顶会审稿标准
- 任正非请“布鞋院士”代言,谁知对方分文不取,只提出一点期望
- 谷歌发布新工具帮助城市“降温”
- 谷歌推AI工具Verse by Verse:能写出知名诗人风格的诗歌
- 传美国至少20州最快于下周对Facebook提出反垄断诉讼
- 超越谷歌,半导体双量子比特保真度达99.99%
- 机器翻译:谷歌翻译是如何对几乎所有语言进行翻译的?
- 提出"一元购",阿里又来"抢生意"?这次照顾的是"穷人"
- 如何运营一个微信小程序商城?